激光雷达也可以“变焦”?RoboSense推出智能“凝视”关注重点感知区域
 ati725
ati7256月25日,RoboSense正式揭晓激光雷达RS-LiDAR-M1智能部分的“秘密武器”:硬件智能+软件智能。即硬件上的智能“凝视GAZE”功能,与软件上的智能目标级感知功能。
2020年被称为激光雷达量产“元年”。去年7月份以来,RS-LiDAR-M1获得大量车企定点车型订单,包括L3重卡方案科技企业、北美新能源车企、中国造车“新实力与新势力”车企、传统主机厂、顶级超跑品牌等,覆盖车型,从超跑到家用车,从乘用车到商用车。

在日常驾驶过程中,司机需要小心处理不同的场景下的特殊路况,时刻关注不同的道路区域:在高速公路行驶时,要关注远处动态车辆与静态小障碍物;驶过街道路口时,警惕周边行人和两轮车;经过拥堵路段时,则提防周边车辆插车行为。智能驾驶同样需要面对各种不同的驾驶场景,这就要求激光雷达感知能力需要适应不同的路况下环境感知的重点。
基于兼顾硬件性能、效率与成本等维度综合设计,RoboSense对车规级激光雷达M1硬件进行智能化升级,实现类似摄像头的变焦技术,取得高效的应用成果。RoboSense将这种智能化功能称之为“凝视GAZE”功能,意为随时聚焦驾驶者关心的重点感知区域。
硬件智能化属于RoboSense在Smart LiDAR System(智能传感器系统)的布局一部分,M1也因此获得CES 2019 创新奖。
目前, RoboSense 已经与定点客户共同完成“ 凝视” 功能的批量样机验证, 6 月份以来,“凝视”功能将在新版RS-LiDAR-M1中正式上线。

M1“凝视”功能推动用户驾乘体验从安全到舒适
M1开启“凝视”提高ROI区域分辨率与关闭“凝视”实测点云对比
智能驾驶车辆启动HWP(highway pilot)模式时,开启M1“凝视”功能,智能提升ROI区域垂直分辨率,让智能驾驶实现从安全到舒适的跨越。开启“ 凝视”的M1 视场中间ROI区域垂直分辨率可以由0.2°动态提升至0.1°(甚至更高分辨率),障碍物点云成像密度翻倍,对前方小物体高度准确测量,帮助规划层可结合车轮与底盘高度判断通过性。
同时,垂直分辨率由0.2°到0.1°的提升,意味着感知算法对车辆的识别距离由120-150米提升到180- 200米, 对静态小型障碍物的检测距离由85米提升到160米, 对于驾驶时速120km/h行驶的智能驾驶车辆而言,这是从安全制动距离到舒适制动/变道距离的质变, 将为用户乘坐舒适度体验带来巨大飞跃。

在城区拥堵时,开启TJP(traffic jam pilot)功能,需要激光雷达拥有更小的盲区(M1 最小盲区可达0.3米) ,及高帧率数据,以帮助快速响应环境的变化。M1的“凝视”功能,可以让帧率从10Hz 瞬间提升到20Hz(甚至更高帧率),“快人一步”完成TJP(traffic jam pilot)跟车功能,防止加塞和避免刮蹭。

△城区场景,M1开启“凝视”高帧率模式与低帧率模式实测对比,高帧率模式下障碍相邻帧间隔更短
假如在拥堵路况下,两辆搭载激光雷达并行的智能驾驶车辆都开启了TJP(traffic jam pilot)功能, 仅有普通10Hz 帧率激光雷达的车辆由于响应慢, 跟车空档大,很轻易被激光雷达帧率提升到20Hz的车辆Cut In, 这会导致极其糟糕的用户体验。
有个激光雷达“凝视”功能的详细技术解读,可以阅读原文:https://mp.weixin.qq.com/s/OPcdZLVURy4ufjT92GmSpA
据悉,这款被称为车规级智能固态激光雷达M1,今年第一季度以来,已经公开了领先的车规级技术与进展:解决激光雷达感知Corner Case 、已通过车规可靠性验证、完成完善的配套功能开发、完全满足SIL-2和ASIL-B等级对于定性和定量的功能安全目标、3月风落成国内首条车规级固态激光雷达量产产线。

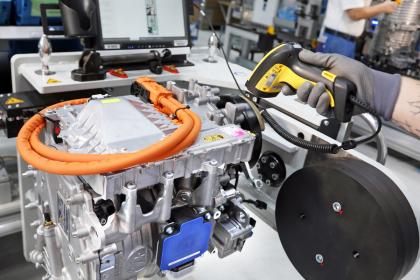
△“硬件智能+软件智能”,车规级智能固态激光雷达RS-LiDAR-M1
在驾乘应用端, RoboSense根据不同驾驶场景和功能需求, 以硬件智能化升级感知能力和效率, 推动智能驾驶系统在驾乘体验上实现飞越的提升;在量产部署端,RoboSense软件智能提供“即插即用”感知算法,缩短系统开发周期,帮助OEM率先推出获得激光雷达赋能提升的高级智能驾驶功能。