“三无”特点贯串始终 浅谈威马公共停车场无人免学习代客泊车技术PAVP
 ati725
ati725JD.POWER中国消费者自动驾驶信心指数调查发现,停车场景(即自动泊车)是超四成消费者期待最先实现无人驾驶技术落地的场景。然而TheCars认为尽管自动泊车功能是驾驶辅助系统中一个重要的板块,但却是TC君在日常试驾体验时几乎不使用的一个项目。
主要是因为TC君对车辆本身控制欲强,以及认为自己停车技术的确比系统强。TC君停车前进行车位观察,开始泊车时更多依赖左右两个外后视镜完成,前后雷达及摄像头仅起到辅助作用。

究其原因,TC君不用自动泊车主要集中在三个关键词:操作繁琐,过程耗时,安全性。
目前在售车型的自动泊车功能大多采用自动泊车辅助(APA),这也是搭载量最高、最为普及的自动泊车技术。它需要驾驶员始终处于驾驶位随时介入,车辆通过少量的车载传感器、处理器和控制系统实现自动识别车位,并自动完成泊车入位。比APA更高级的是遥控泊车辅助(RPA),实现了在车外一定可视范围内使用遥控装置(手机或钥匙)控制车辆进行泊入、泊出、直进、直出等功能,但整个过程中驾驶员必须始终监控车辆状态。

固定车位无人记忆代客泊车(HAVP)是更进一步的自动泊车方案,它主要针对高频使用的固定停车位。首先需要设定记忆路线和记忆车位,然后在驾驶员监控下,系统辅助控制车辆沿着设定的记忆路线在地下停车场行驶,并泊入成功记忆过的车位。
以上三种自动泊车技术各有利弊,但都无法解决目前各泊车环境下的需求痛点,无法实现全场景应用。而且不少自动泊车使用的是雷达识别方案,并非“视觉方案+雷达”,因此辨识车位不能够通过识别车位线完成,不少空车位是肉眼可见但雷达并不能判断识别车位或者识别错误,这是单基于雷达自动泊车通病所在。
近日,威马发布了公共停车场无人免学习代客泊车(PAVP)技术,该技术为用户在公共停车场智能泊车提供了完美解决方案。威马W6成为了首款搭载该技术的车型。

PAVP,即Public Automated Valet Parking,公共场所自动代客泊车。用户仅需通过手机APP操作,即可实现远程智能召唤、智能泊车。在泊车过程中,系统将依靠车辆自身传感器、停车场高精地图、停车场定位标识、云端调度,共同实现自主代客泊车功能。
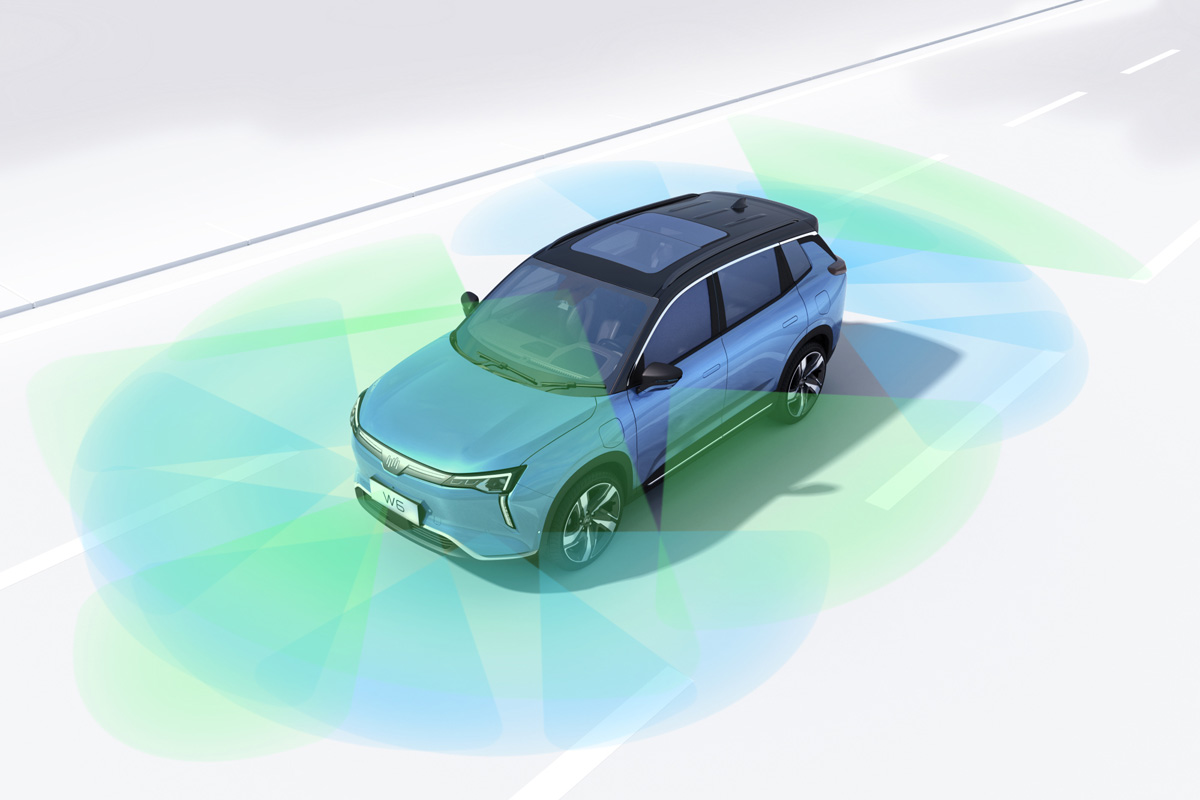
PAVP技术具有三大特性,或者说是三大创新,其中包括了无人驾驶、无需学习、无限距离的“三无”特点。硬件配置上,通过2个高清前视摄像头、4个高清环视摄像头、12个超声波雷达、5个毫米波雷达组成的传感器组合,并搭载第三代数字座舱平台SA8155芯片,配合超强算力的CPU和GPU以及厘米级精准定位的高精地图服务、手机端操作泊车指令、云端等配合,实现无人驾驶。

PAVP技术支持泊车与召唤的“一进一出”,实现了停车环节的闭环。将威马W6行驶至停车场内指定落客区域,打开威马APP,选择“高精度地图泊车“功能,然后选择“智能泊车”。云端将派发泊车车位及泊车线路,车辆从PAVP指定下车点自动驾驶至PAVP指定停车区内,并自动泊入到指定的车位中。

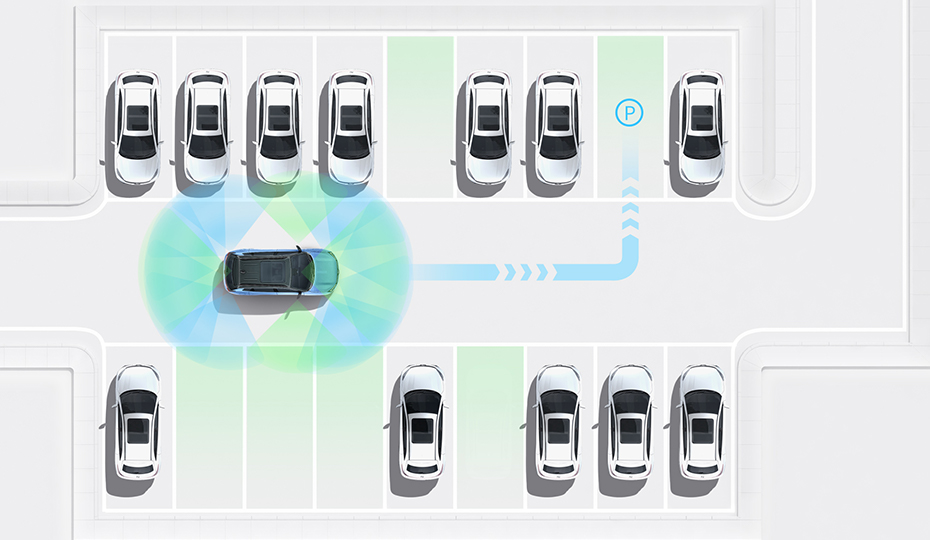
将车从车位中召唤到上车点也十分便捷。首先打开威马APP,选择“高精度地图泊车“功能,选择指定取车点,然后点击“开始”,便可从容地前往指定取车点。此时车辆会自动上电顺利驶出泊车位,并行驶至系统预设上车点,实现人车会合。

此外,PAVP技术还可以实现包括跨层、主动避让障碍物、遇到行人主动停车/避让、无法通行时联系地勤手机端提示等功能,提升了使用的安全性和便捷性,弥补了其它自动泊车系统的短板和不足。
还有一点需要说明,威马W6配备的AVP自主泊车系统,其实已经能为用户解决不少泊车难题。固定车位无人记忆代客泊车(HAVP)已经上线,能够在特定的环境下实现自动泊车,用户操作威马智行APP即可。而此次发布的PAVP技术将预计将在近期通过OTA升级推送给威马W6用户。
PAVP技术能够全面覆盖现阶段及未来几年的泊车需求,但是传感器数量众多且是“视觉+雷达”的解决方案,所以尽管功能高效并能适用于各类场景,但或许并不是一种高性价比的解决方案,如何能在威马汽车品牌的所有产品上都能分享到PAVP技术带来的技术福利,最终让用户收益,可能是更关键的。(文/李希楠)