
蔚来推出ACC 车主实测后列出了一二三四五六七八九 | 碳粉说
 hsutoo
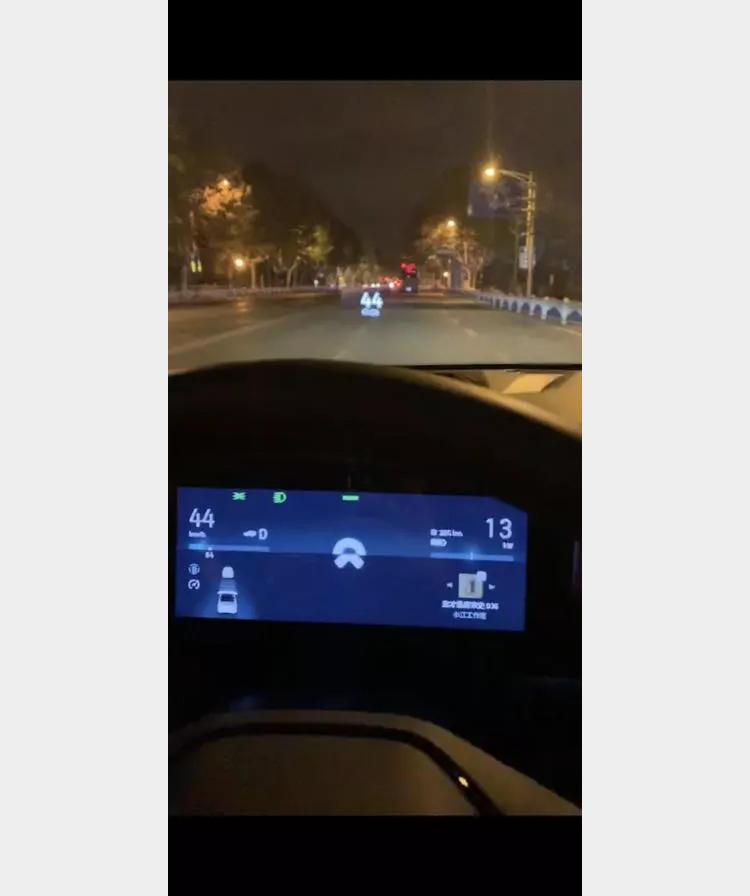
hsutoo由于碳粉群主的不作为,「碳粉说」这个栏目一直没有很好的运作起来。这里提出公开谴责。今天这篇文章,来自一名碳粉群早期成员。昨天,蔚来推送了 1.2.3 软件版本,终于释放了 ACC 的功能。很多车主从昨天下午到晚上,一直琢磨怎么还不下载下来,网上也有车主放出了视频。但这个功能好不好用?来看看他是怎么说的。
NIO Pilot(以下简称NP)的第一个主动能用的功能ACC,在千呼万唤中终于开始推送。而之前说好的碳粉科普,也意料之中的和蔚来的软件一起跳票了…其实主要是杠精太多…
言归正传,之前蔚来官方的 ACC 科普文写的很好也很严谨,看完后很多人有疑问:就一个ACC有必要吗?
看了下评论主要有以下几个观点:
1,我十年前的xx车就有ACC。
2,现在十万块的车上就有ACC。
3,这么严谨一定是功能不行。
从而得出结论:蔚来一点也不牛逼。
■ 蔚来的 ACC 是个什么鬼?
那就首先来说说这三个问题。
1、十年前的ACC和现在的ACC一样?
十年前我记得看顶配大众 cc 和迈腾的时候,的确有 ACC而且还有 LKA(车道保持)。的确这个功能历史挺久的了。
不过,此 ACC 不同于彼 ACC。蔚来的 ACC 可以称为全速域 ACC ,翻译成人话就是「在任何速度下都可以使用的带跟随功能的ACC」。
根据蔚来官方文件,这个速度域是 0-160 码(首次启动条件是15码)。(很神奇的是蔚来竟然不吹这个功能,可能觉得跳票太久了不好意思吧…不要打我)
这个功能的最大特点是可以跟随前车至完全静止,再从静止跟随前车直接起步。
许多车型使用的 ACC 必须在 30km/h 以上才能完全启动,且不能完全刹停、不能由静止状态直接跟随前车起步。
比如碳粉群群主@群众胖电池 的 RX450h,ACC 功能会在30公里以下自动退出,而 NP 里的 ACC 能刹停、在 5 秒内前车启动会自动跟车,静止5秒后暂停,通过按键恢复跟车(这是一个安全设置)。
而这个功能,也是当年特斯拉 Autopilot 中 ACC 和其他车企的 ACC 主要的区别。
2、现在十万块的车上的ACC和NP里的ACC一样?
随着技术的下放和成本的降低,有部分十万块的车上用了博世的 ADAS 方案,也能实现自适应巡航以及车道保持功能。
但是正如@蟹老板本人 之前文章里写过的,传统汽车供应链给 OEM 厂商的东西完全是个黑匣子,而蔚来不愿意。
博世给的东西,对于厂商而言完全是个黑盒子。这会导致后续 OTA 计划无法实施,只能被动等待博世的后续研发,这却与智能汽车能够通过 OTA 不断迭代进化的原则是完全相悖的。
所以结论就是,NP的 ACC 可升级可优化,而十万块里的ACC就只是供应商提供的一个功能而已。
3、这么严谨一定是你蔚来没做好。
其实其他车企,包括激进如特斯拉的用户手册上,对 ACC 以及 Autopilot的限制是非常多的,甚至媒体用了「超详细」三个字来描述,具体大家去翻翻特斯拉或者沃尔沃的用户手册就能知道。而蔚来通过 APP 来推送是独此一家。
■ 那么 ACC 能实现哪些功能呢?是不是自动驾驶呢?
用@蟹老板本人 的话说,ACC 并不是黑科技,但从技术发展路径来看,ACC 是高速自动辅助驾驶、拥堵自动辅助驾驶等功能的前置功能。换句话说,你必须把 ACC 这个技能点点到了、点好了,才会有类似特斯拉那种在封闭道路(高速公路)的可脱手驾驶,甚至不建议、但事实上存在的打个盹。
而从自动驾驶分级来看,提供 ACC 功能后可以算上实现了 L1,等 6 月开放了NP的主要功能后,可以达到 L2 级别。

至于 L3 或者压根不存在的 L2.5,别听外面那些妖艳贱货的 PPT。
L3有个知名的悖论就是这个功能开车的时候不让你控制,又要你随时保持警惕接管,从而更容易导致事故的发生。
所以我们可能这辈子都见不到L3,而是直接见到L4、L5。
有个小彩蛋是,以目前蔚来的硬件和算力(不考虑软件研发能力)加上高精地图后,理论上能实现类似特斯拉navigate on autopilot、停车场级别的召唤(不是遥控)等高级L2功能,最后无限接近L3。当然,NP功能表里的打方向变道等功能也快了。
■ 那蔚来 ACC 的体验怎么样?
用@蟹老板本人 和碳粉群群主@群众胖电池 的话说就是:完成度较高,但还有优化的空间。作为碳粉,来说说 NP 中 ACC 的优缺点和使用中可能的注意事项。
1、NP 中 ACC 的加减速比特斯拉柔和的多,特斯拉经常会有突兀的加速和制动,而 NP 调教的很平顺,加速时候的功率也就在十几二十千瓦,可以说是个「新手老司机」。
2、前车距离(其实不是距离,而是碰撞时间,为了好理解就算是距离把)五档可调,一般车是 3 档,当然特斯拉没记错的话是十档。1 档停下来的距离应该是 4 米,别说距离远…安全第一。


3、在高架上(市区不敢试)边上车道有车插入时反应很快,大致进入1/3车身的时候就能准确识别出来,当然目前还没有启用三车道识别(特斯拉有而且能控制,小鹏能识别但是不能实现横向控制)。

5、变换车道时,对前方不管是远处还是近处的车识别很快,能准确识别目标。这点市区高架都试了,高架基本不会有危险,但是市区需要注意复杂的路况,有可能会引起一定的急刹,毕竟识别需要时间。
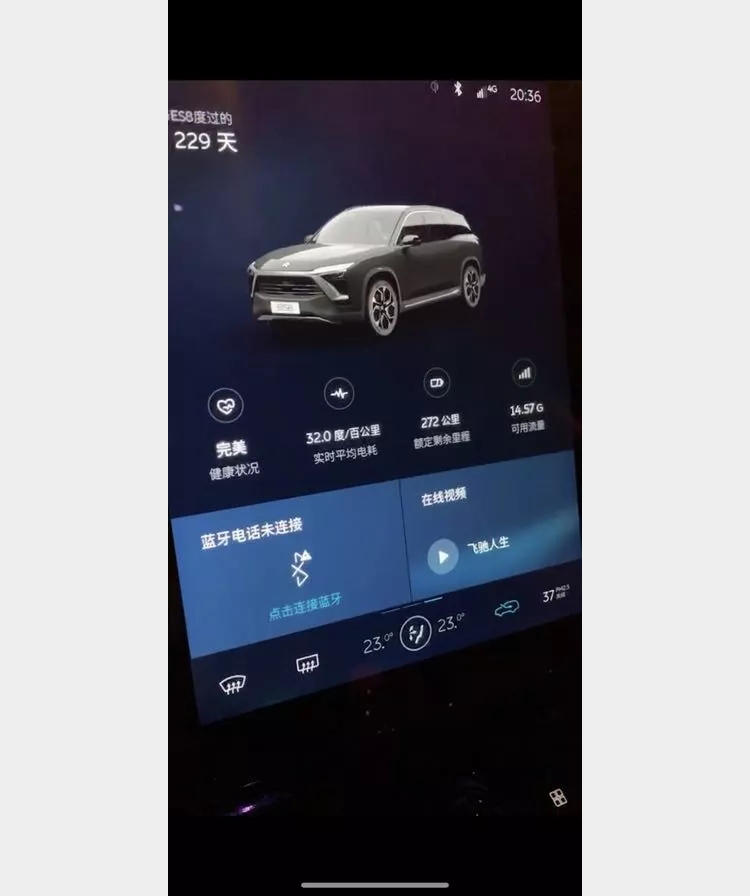
6、ACC减速时没有使用能量回收,而是通过刹车。这个可能会导致频繁加减速时候的能耗变高,尤其在市区,测试的时候市区非拥堵路段平均能耗达到了 32,而高架、高速相对匀速的路段能耗会下来。而根据蔚来的说法,会在 3-4 个月内解决这个问题,那我们降低期望值把时间点放在 8 月吧。
■ 关于这点我要重点说说。
众所周知,因为蔚来采用的是ibooster1.0,刹车和能量回收是不绑定的。这句话很多人在理解的时候会有误解,认为 ACC 也不能通过能量回收来施加制动力。
其实刹车和能量回收不绑定意思是踩刹车的时候不会根据你刹车的力度自动采用回收或者机械刹车,而 ACC 完全可以把能量回收和刹车动作分离来实现在不同情况下通过能量回收或者刹车来实现制动力,所以并不会不能实现,只是需要大量的测试和优化。
7、前车突然变道消失、而再前面车又很远或者静止时的情况下会加速,再检测到前面车时候会及时进行制动。坏消息是你需要随时保持接管,这个在蔚来的手册里也有写;好消息是 NP 的 FCW 和 AEB 有可能会及时介入避免危险。
8、对于静止物体的识别可能会不及时更有可能漏检,这点在试ACC的时候没有发生,NP 及时检测到前方静止的车辆并进行制动,当然速度快可能会很危险并且无法刹停,符合手册的告知。
从特斯拉的几次事故中可以看出来,对于洒水车这类大型而又静止的车辆识别会有误差。NP 的 ACC 是通过摄像头和毫米波雷达融合实现的,理论上比特斯拉摄像头为主、以及其他车仅通过毫米波雷达来判断要安全。(只是理论上)
9、最后要说的是,不管是 AEB (紧急刹车,它并不识别墙!是的,所有的 AEB都不识别墙!!也不识别纸箱!所以别拿纸箱去试!而且有速度限制),还是 ACC,包括还未推送的车道保持,都是一项辅助功能!
在带来舒适的同时并不能避免所有危险,作为司机仍旧要保持对路面的观察,及时介入。另外在市区路况比较复杂,经常有行人自行车穿出的情况下,还是不要用 ACC 比较安全,因为任何机械电子都远比不上造物主创造的人类来的精妙和神奇!



